bezier¶
与贝塞尔曲线相关的实用函数。
函数
- bezier(points: BezierPointsLike) Callable[[float | ColVector], Point3D | Point3D_Array][source]¶
- bezier(points: Sequence[Point3DLike_Array]) Callable[[float | ColVector], Point3D_Array]
贝塞尔曲线的经典实现。
- 参数:
points – 一个形状为 \((d+1, 3)\) 的数组,包含 \(d+1\) 个控制点,定义了一条 \(d\) 次贝塞尔曲线。另外,为了向量化,
points也可以是一个形状为 \((d+1, M, 3)\) 的序列,包含 \(d+1\) 个数组,每个数组有 \(M\) 个控制点,这样可以定义 M 条贝塞尔曲线。- 返回:
bezier_func – 描述贝塞尔曲线的函数。此函数的行为取决于
points的形状。如果
points是一个表示单个贝塞尔曲线的 \((d+1, 3)\) 数组,那么bezier_func可以接收以下类型:一个
floatt,在这种情况下,它会返回一个形状为 \((1, 3)\) 的Point3D,表示贝塞尔曲线在t处的求值,或者一个形状为 \((n, 1)\) 的
ColVector,包含 \(n\) 个用于评估贝塞尔曲线的值,并返回一个形状为 \((n, 3)\) 的Point3D_Array,其中包含在 \(n\) 个值处评估贝塞尔曲线所得到的点。
警告
如果将 \(t\) 值的向量传递给
bezier_func,它必须是形状为 \((n, 1)\) 的列向量/矩阵。不支持传递形状为 \((n,)\) 的一维数组,这会导致未定义行为。如果
points是一个描述 \(M\) 条贝塞尔曲线的 \((d+1, M, 3)\) 数组,那么bezier_func可以接收以下类型:一个
floatt,在这种情况下,它会返回一个形状为 \((M, 3)\) 的Point3D_Array,表示 \(M\) 条贝塞尔曲线在相同值t处的求值,或者一个形状为 \((M, 1)\) 的
ColVector,包含 \(M\) 个值,这样由points定义的第 \(i\) 条贝塞尔曲线会在t中对应的第 \(i\) 个值处进行评估,并再次返回一个形状为 \((M, 3)\) 的Point3D_Array,其中包含这 \(M\) 个评估结果。
警告
与上一种情况不同,如果将
ColVector传递给bezier_func,它必须正好包含 \(M\) 个值,每个值对应由points定义的 \(M\) 条贝塞尔曲线中的每一条。任何形状不是 \((M, 1)\) 的数组都会导致未定义行为。
- 返回类型:
typing.Callable[[float|ColVector],Point3D|Point3D_Array]
- bezier_remap(bezier_tuples, new_number_of_curves)[source]¶
将
bezier_tuples中的每条曲线细分为所需的部分,直到最终曲线数量达到期望值new_number_of_curves。- 参数:
bezier_tuples (BezierPointsLike_Array) –
一个由多个 \(d\) 次贝塞尔曲线组成的数组,用于重新映射。该数组的形状必须是
(current_number_of_curves, nppc, dim),其中current_number_of_curves是数组bezier_tuples中当前的曲线数量,nppc是每条曲线的点数,使得它们的次数为nppc-1,并且dim是点的维度,通常为 \(3\)。
new_number_of_curves (int) – 输出将包含的曲线数量。这需要高于当前数量。
- 返回:
形状为
(new_number_of_curves, nppc, dim)的新数组,包含重新映射后的新贝塞尔曲线。- 返回类型:
- get_quadratic_approximation_of_cubic(a0: Point3DLike, h0: Point3DLike, h1: Point3DLike, a1: Point3DLike) QuadraticSpline[source]¶
- get_quadratic_approximation_of_cubic(a0: Point3DLike_Array, h0: Point3DLike_Array, h1: Point3DLike_Array, a1: Point3DLike_Array) QuadraticBezierPath
如果
a0、h0、h1和a1是一条三次贝塞尔曲线的控制点,则用两条二次贝塞尔曲线来近似该曲线,并返回一个包含 6 个点的数组,其中前 3 个点表示第一条二次曲线,后 3 个点表示第二条。否则,如果
a0、h0、h1和a1是表示 \(N\) 条三次贝塞尔曲线的 \(N\) 个点的数组,则返回一个包含 \(6N\) 个点的数组,其中每组 \(6\) 个连续点以类似上述方式近似 \(N\) 条曲线中的每一条。注意
如果原始三次贝塞尔曲线所组成的三次样条是平滑的,则此算法将生成一个同样平滑的二次样条。
如果一条三次贝塞尔曲线由以下给出:
\[C(t) = (1-t)^3 A_0 + 3(1-t)^2 t H_0 + 3(1-t)t^2 H_1 + t^3 A_1\]其中 \(A_0\)、\(H_0\)、\(H_1\) 和 \(A_1\) 是其控制点,则此算法应生成以下两条二次贝塞尔曲线:
\[\begin{split}Q_0(t) &= (1-t)^2 A_0 + 2(1-t)t M_0 + t^2 K \\ Q_1(t) &= (1-t)^2 K + 2(1-t)t M_1 + t^2 A_1\end{split}\]其中 \(M_0\) 和 \(M_1\) 是两条曲线各自要找到的句柄,\(K\) 是第一条曲线的终点锚点和第二条曲线的起点锚点,同样需要找到。
为了求解 \(M_0\)、\(M_1\) 和 \(K\),可以施加三个条件:
\(Q_0'(0) = \frac{1}{2}C'(0)\)。第一条二次曲线在 \(t = 0\) 处的导数应与原始三次曲线在 \(t = 0\) 处的导数成比例。由于三次曲线被分成两部分,因此需要将其除以二:点沿着曲线移动的速度应是原始速度的一半。这得出:
\[\begin{split}Q_0'(0) &= \frac{1}{2}C'(0) \\ 2(M_0 - A_0) &= \frac{3}{2}(H_0 - A_0) \\ 2M_0 - 2A_0 &= \frac{3}{2}H_0 - \frac{3}{2}A_0 \\ 2M_0 &= \frac{3}{2}H_0 + \frac{1}{2}A_0 \\ M_0 &= \frac{1}{4}(3H_0 + A_0)\end{split}\]\(Q_1'(1) = \frac{1}{2}C'(1)\)。第二条二次曲线在 \(t = 1\) 处的导数应是原始三次曲线在 \(t = 1\) 处导数的一半,原因同上。这得出:
\[\begin{split}Q_1'(1) &= \frac{1}{2}C'(1) \\ 2(A_1 - M_1) &= \frac{3}{2}(A_1 - H_1) \\ 2A_1 - 2M_1 &= \frac{3}{2}A_1 - \frac{3}{2}H_1 \\ -2M_1 &= -\frac{1}{2}A_1 - \frac{3}{2}H_1 \\ M_1 &= \frac{1}{4}(3H_1 + A_1)\end{split}\]\(Q_0'(1) = Q_1'(0)\)。两条二次曲线的导数在点 \(K\) 处应匹配,以使最终样条平滑。这得出:
\[\begin{split}Q_0'(1) &= Q_1'(0) \\ 2(K - M_0) &= 2(M_1 - K) \\ 2K - 2M_0 &= 2M_1 - 2K \\ 4K &= 2M_0 + 2M_1 \\ K &= \frac{1}{2}(M_0 + M_1)\end{split}\]
这足以找到二次贝塞尔曲线的正确控制点。
- 参数:
a0 – 单个三次贝塞尔曲线的起始锚点,或者是 \(N\) 条曲线的 \(N\) 个起始锚点数组。
h0 – 单个三次贝塞尔曲线的第一个句柄,或者是 \(N\) 条曲线的 \(N\) 个第一个句柄数组。
h1 – 单个三次贝塞尔曲线的第二个句柄,或者是 \(N\) 条曲线的 \(N\) 个第二个句柄数组。
a1 – 单个三次贝塞尔曲线的结束锚点,或者是 \(N\) 条曲线的 \(N\) 个结束锚点数组。
- 返回:
一个数组,包含 6 个点用于近似原始三次曲线的两条二次贝塞尔曲线,或者 \(6N\) 个点用于近似 \(N\) 条三次曲线的 \(2N\) 条二次曲线。
- 返回类型:
结果
- 抛出:
ValueError – 如果
a0、h0、h1和a1具有不同的维度,或者它们的维度数不是 1 或 2。
- get_smooth_closed_cubic_bezier_handle_points(anchors)[source]¶
get_smooth_cubic_bezier_handle_points()的特例,当anchors形成闭合循环时。注意
必须解方程组才能得到每条贝塞尔曲线的第一个句柄(称为 \(H_1\))。然后 \(H_2\)(第二个句柄)可以单独获得。
通常,如果有 \(N+1\) 个锚点,就会有 \(N\) 条贝塞尔曲线,因此需要找到 \(N\) 对句柄。我们必须为第一个句柄(以 \(N = 5\) 为例)求解以下方程组:
\[\begin{split}\begin{pmatrix} 4 & 1 & 0 & 0 & 1 \\ 1 & 4 & 1 & 0 & 0 \\ 0 & 1 & 4 & 1 & 0 \\ 0 & 0 & 1 & 4 & 1 \\ 1 & 0 & 0 & 1 & 4 \end{pmatrix} \begin{pmatrix} H_{1,0} \\ H_{1,1} \\ H_{1,2} \\ H_{1,3} \\ H_{1,4} \end{pmatrix} = \begin{pmatrix} 4A_0 + 2A_1 \\ 4A_1 + 2A_2 \\ 4A_2 + 2A_3 \\ 4A_3 + 2A_4 \\ 4A_4 + 2A_5 \end{pmatrix}\end{split}\]这将被表示为 \(RH_1 = D\)。
\(R\) 几乎是一个三对角矩阵,所以我们可以使用托马斯算法。
另请参阅
然而,\(R\) 在对角有 1。解决这个问题的方法是下面链接中提出的第一个分解,其中 \(\alpha = 1\)
另请参阅
\[\begin{split}R = \begin{pmatrix} 4 & 1 & 0 & 0 & 1 \\ 1 & 4 & 1 & 0 & 0 \\ 0 & 1 & 4 & 1 & 0 \\ 0 & 0 & 1 & 4 & 1 \\ 1 & 0 & 0 & 1 & 4 \end{pmatrix} &= \begin{pmatrix} 3 & 1 & 0 & 0 & 0 \\ 1 & 4 & 1 & 0 & 0 \\ 0 & 1 & 4 & 1 & 0 \\ 0 & 0 & 1 & 4 & 1 \\ 0 & 0 & 0 & 1 & 3 \end{pmatrix} + \begin{pmatrix} 1 & 0 & 0 & 0 & 1 \\ 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 \\ 1 & 0 & 0 & 0 & 1 \end{pmatrix} \\ & \\ &= \begin{pmatrix} 3 & 1 & 0 & 0 & 0 \\ 1 & 4 & 1 & 0 & 0 \\ 0 & 1 & 4 & 1 & 0 \\ 0 & 0 & 1 & 4 & 1 \\ 0 & 0 & 0 & 1 & 3 \end{pmatrix} + \begin{pmatrix} 1 \\ 0 \\ 0 \\ 0 \\ 1 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & 0 & 1 \end{pmatrix} \\ & \\ &= T + uv^t\end{split}\]我们将 \(R = T + uv^t\) 分解,其中 \(T\) 是一个三对角矩阵,\(u, v\) 是 \(N\) 维向量,满足 \(u_0 = u_{N-1} = v_0 = v_{N-1} = 1\),并且 \(u_i = v_i = 0, \forall i \in \{1, ..., N-2\}\)。
因此
\[\begin{split}RH_1 &= D \\ \Rightarrow (T + uv^t)H_1 &= D\end{split}\]如果我们找到一个向量 \(q\) 使得 \(Tq = u\)
\[\begin{split}\Rightarrow (T + Tqv^t)H_1 &= D \\ \Rightarrow T(I + qv^t)H_1 &= D \\ \Rightarrow H_1 &= (I + qv^t)^{-1} T^{-1} D\end{split}\]根据谢尔曼-莫里森公式
另请参阅
\[(I + qv^t)^{-1} = I - \frac{1}{1 + v^tq} qv^t\]如果我们找到 \(Y = T^{-1} D\),换句话说,如果我们求解 \(TY = D\) 中的 \(Y\)
\[\begin{split}H_1 &= (I + qv^t)^{-1} T^{-1} D \\ &= (I + qv^t)^{-1} Y \\ &= (I - \frac{1}{1 + v^tq} qv^t) Y \\ &= Y - \frac{1}{1 + v^tq} qv^tY\end{split}\]因此,我们必须在 \(Tq = u\) 和 \(TY = D\) 中求解 \(q\) 和 \(Y\)。由于 \(T\) 现在是三对角矩阵,我们将使用托马斯算法。
定义
\(a = [a_0, \ a_1, \ ..., \ a_{N-2}]\) 作为 \(T\) 的下对角线,包含 \(N-1\) 个元素,使得 \(a_0 = a_1 = ... = a_{N-2} = 1\),因此该对角线填充为 1;
\(b = [b_0, \ b_1, \ ..., \ b_{N-2}, \ b_{N-1}]\) 作为 \(T\) 的主对角线,包含 \(N\) 个元素,使得 \(b_0 = b_{N-1} = 3\),且 \(b_1 = b_2 = ... = b_{N-2} = 4\);
\(c = [c_0, \ c_1, \ ..., \ c_{N-2}]\) 作为 \(T\) 的上对角线,包含 \(N-1\) 个元素,使得 \(c_0 = c_1 = ... = c_{N-2} = 1\):该对角线也填充为 1。
如果根据托马斯算法,我们定义
\[\begin{split}c'_0 &= \frac{c_0}{b_0} & \\ c'_i &= \frac{c_i}{b_i - a_{i-1} c'_{i-1}}, & \quad \forall i \in \{1, ..., N-2\} \\ & & \\ u'_0 &= \frac{u_0}{b_0} & \\ u'_i &= \frac{u_i - a_{i-1} u'_{i-1}}{b_i - a_{i-1} c'_{i-1}}, & \quad \forall i \in \{1, ..., N-1\} \\ & & \\ D'_0 &= \frac{1}{b_0} D_0 & \\ D'_i &= \frac{1}{b_i - a_{i-1} c'_{i-1}} (D_i - a_{i-1} D'_{i-1}), & \quad \forall i \in \{1, ..., N-1\}\end{split}\]则
\[\begin{split}c'_0 &= \frac{1}{3} & \\ c'_i &= \frac{1}{4 - c'_{i-1}}, & \quad \forall i \in \{1, ..., N-2\} \\ & & \\ u'_0 &= \frac{1}{3} & \\ u'_i &= \frac{-u'_{i-1}}{4 - c'_{i-1}} = -c'_i u'_{i-1}, & \quad \forall i \in \{1, ..., N-2\} \\ u'_{N-1} &= \frac{1 - u'_{N-2}}{3 - c'_{N-2}} & \\ & & \\ D'_0 &= \frac{1}{3} (4A_0 + 2A_1) & \\ D'_i &= \frac{1}{4 - c'_{i-1}} (4A_i + 2A_{i+1} - D'_{i-1}) & \\ &= c_i (4A_i + 2A_{i+1} - D'_{i-1}), & \quad \forall i \in \{1, ..., N-2\} \\ D'_{N-1} &= \frac{1}{3 - c'_{N-2}} (4A_{N-1} + 2A_N - D'_{N-2}) &\end{split}\]最后,我们可以进行回代以找到 \(q\) 和 \(Y\)
\[\begin{split}q_{N-1} &= u'_{N-1} & \\ q_i &= u'_{i} - c'_i q_{i+1}, & \quad \forall i \in \{0, ..., N-2\} \\ & & \\ Y_{N-1} &= D'_{N-1} & \\ Y_i &= D'_i - c'_i Y_{i+1}, & \quad \forall i \in \{0, ..., N-2\}\end{split}\]有了这些值,我们最终可以计算 \(H_1 = Y - \frac{1}{1 + v^tq} qv^tY\)。鉴于 \(v_0 = v_{N-1} = 1\),且 \(v_1 = v_2 = ... = v_{N-2} = 0\),它与 \(q\) 和 \(Y\) 的点积分别是 \(v^tq = q_0 + q_{N-1}\) 和 \(v^tY = Y_0 + Y_{N-1}\)。因此
\[H_1 = Y - \frac{1}{1 + q_0 + q_{N-1}} q(Y_0 + Y_{N-1})\]一旦我们有了 \(H_1\),我们可以通过以下方式获得 \(H_2\)(第二个句柄的数组):
\[\begin{split}H_{2, i} &= 2A_{i+1} - H_{1, i+1}, & \quad \forall i \in \{0, ..., N-2\} \\ H_{2, N-1} &= 2A_0 - H_{1, 0} &\end{split}\]因为矩阵 \(R\) 总是遵循相同的模式(\(T, u, v\) 也一样),我们可以为 \(c'\) 和 \(u'\) 定义一个备忘列表,以避免重复计算。然而,我们不能对 \(D\) 和 \(Y\) 进行备忘,因为它们总是不同的矩阵。我们也不能为 \(q\) 创建备忘录,但我们可以更快地计算它,因为 \(u'\) 可以被备忘。
- 参数:
anchors (Point3DLike_Array) – 闭合三次样条的锚点。
- 返回:
包含两个数组的元组:一个包含闭合三次样条中每条曲线的第一个句柄,另一个包含第二个句柄。
- 返回类型:
tuple[Point3D_Array,Point3D_Array]
- get_smooth_cubic_bezier_handle_points(anchors)[source]¶
给定一个三次样条的锚点数组(由连接的三次贝塞尔曲线组成的数组),计算每条曲线的第一个和第二个句柄,使生成的样条是平滑的。
- 参数:
anchors (Point3DLike_Array) – 三次样条的锚点。
- 返回:
包含两个数组的元组:一个包含三次样条中每条曲线的第一个句柄,另一个包含第二个句柄。
- 返回类型:
tuple[Point3D_Array,Point3D_Array]
- get_smooth_open_cubic_bezier_handle_points(anchors)[source]¶
get_smooth_cubic_bezier_handle_points()的特例,当anchors不形成闭合循环时。注意
必须解方程组才能得到每条贝塞尔曲线的第一个句柄(称为 \(H_1\))。然后 \(H_2\)(第二个句柄)可以单独获得。
另请参阅
这些方程来源于:
警告
第一个网页中的方程存在一些笔误,已在评论中纠正。
通常,如果有 \(N+1\) 个锚点,就会有 \(N\) 条贝塞尔曲线,因此需要找到 \(N\) 对句柄。我们必须为第一个句柄(以 \(N = 5\) 为例)求解以下方程组:
\[\begin{split}\begin{pmatrix} 2 & 1 & 0 & 0 & 0 \\ 1 & 4 & 1 & 0 & 0 \\ 0 & 1 & 4 & 1 & 0 \\ 0 & 0 & 1 & 4 & 1 \\ 0 & 0 & 0 & 2 & 7 \end{pmatrix} \begin{pmatrix} H_{1,0} \\ H_{1,1} \\ H_{1,2} \\ H_{1,3} \\ H_{1,4} \end{pmatrix} = \begin{pmatrix} A_0 + 2A_1 \\ 4A_1 + 2A_2 \\ 4A_2 + 2A_3 \\ 4A_3 + 2A_4 \\ 8A_4 + A_5 \end{pmatrix}\end{split}\]这将被表示为 \(TH_1 = D\)。\(T\) 是一个三对角矩阵,因此该系统可以在 \(O(N)\) 操作中求解。这里我们将使用托马斯算法或三对角矩阵算法。
另请参阅
定义
\(a = [a_0, \ a_1, \ ..., \ a_{N-2}]\) 作为 \(T\) 的下对角线,包含 \(N-1\) 个元素,使得 \(a_0 = a_1 = ... = a_{N-3} = 1\),且 \(a_{N-2} = 2\);
\(b = [b_0, \ b_1, \ ..., \ b_{N-2}, \ b_{N-1}]\) 作为 \(T\) 的主对角线,包含 \(N\) 个元素,使得 \(b_0 = 2\),\(b_1 = b_2 = ... = b_{N-2} = 4\),且 \(b_{N-1} = 7\);
\(c = [c_0, \ c_1, \ ..., \ c_{N-2}]\) 作为 \(T\) 的上对角线,包含 \({N-1}\) 个元素,使得 \(c_0 = c_1 = ... = c_{N-2} = 1\):该对角线填充为 1。
如果根据托马斯算法,我们定义
\[\begin{split}c'_0 &= \frac{c_0}{b_0} & \\ c'_i &= \frac{c_i}{b_i - a_{i-1} c'_{i-1}}, & \quad \forall i \in \{1, ..., N-2\} \\ & & \\ D'_0 &= \frac{1}{b_0} D_0 & \\ D'_i &= \frac{1}{b_i - a_{i-1} c'{i-1}} (D_i - a_{i-1} D'_{i-1}), & \quad \forall i \in \{1, ..., N-1\}\end{split}\]则
\[\begin{split}c'_0 &= 0.5 & \\ c'_i &= \frac{1}{4 - c'_{i-1}}, & \quad \forall i \in \{1, ..., N-2\} \\ & & \\ D'_0 &= 0.5A_0 + A_1 & \\ D'_i &= \frac{1}{4 - c'_{i-1}} (4A_i + 2A_{i+1} - D'_{i-1}) & \\ &= c_i (4A_i + 2A_{i+1} - D'_{i-1}), & \quad \forall i \in \{1, ..., N-2\} \\ D'_{N-1} &= \frac{1}{7 - 2c'_{N-2}} (8A_{N-1} + A_N - 2D'_{N-2}) &\end{split}\]最后,我们可以进行回代以找到 \(H_1\)
\[\begin{split}H_{1, N-1} &= D'_{N-1} & \\ H_{1, i} &= D'_i - c'_i H_{1, i+1}, & \quad \forall i \in \{0, ..., N-2\}\end{split}\]一旦我们有了 \(H_1\),我们可以通过以下方式获得 \(H_2\)(第二个句柄的数组):
\[\begin{split}H_{2, i} &= 2A_{i+1} - H_{1, i+1}, & \quad \forall i \in \{0, ..., N-2\} \\ H_{2, N-1} &= 0.5A_N + 0.5H_{1, N-1} &\end{split}\]由于矩阵 \(T\) 总是遵循相同的模式,我们可以为 \(c'\) 定义一个备忘列表,以避免重复计算。然而,我们不能对 \(D\) 做同样的操作,因为它总是不同的矩阵。
- 参数:
anchors (Point3DLike_Array) – 开放三次样条的锚点。
- 返回:
包含两个数组的元组:一个包含开放三次样条中每条曲线的第一个句柄,另一个包含第二个句柄。
- 返回类型:
tuple[Point3D_Array,Point3D_Array]
- integer_interpolate(start, end, alpha)[source]¶
这是 interpolate 的一个变体,它返回一个整数和余数
- 参数:
start (float) – 范围的起始值
end (float) – 范围的结束值
alpha (float) – 一个介于 0 和 1 之间的浮点数。
- 返回:
这会返回一个介于 start 和 end(包括两端)之间的整数,表示它们之间适当的插值,以及一个“余数”,表示返回整数与列表中下一个整数之间的新比例。
- 返回类型:
tuple[int, float]
示例
>>> integer, residue = integer_interpolate(start=0, end=10, alpha=0.46) >>> np.allclose((integer, residue), (4, 0.6)) True
- interpolate(start: float, end: float, alpha: float) float[source]¶
- interpolate(start: float, end: float, alpha: ColVector) ColVector
- interpolate(start: Point3D, end: Point3D, alpha: float) Point3D
- interpolate(start: Point3D, end: Point3D, alpha: ColVector) Point3D_Array
在两个值
start和end之间进行线性插值。- 参数:
start – 范围的起始值。
end – 范围的结束值。
alpha – 一个介于 0 和 1 之间的浮点数,或者一个包含 \(n\) 个介于 0 和 1 之间浮点数的 \((n, 1)\) 列向量,用于向量化插值。
- 返回:
线性插值的结果。
- 返回类型:
float|ColVector|Point3D|Point3D_Array
- inverse_interpolate(start: float, end: float, value: float) float[source]¶
- inverse_interpolate(start: float, end: float, value: Point3D) Point3D
- inverse_interpolate(start: Point3D, end: Point3D, value: Point3D) Point3D
执行逆插值,以确定在给定起始值和结束值或点的情况下,产生指定
value的 alpha 值。- 参数:
start – 插值的起始值或点。
end – 插值的结束值或点。
value – 应确定其 alpha 值的数值或点。
- 返回:
产生给定输入的 alpha 值
在
start和end之间进行插值时。
示例
>>> inverse_interpolate(start=2, end=6, value=4) np.float64(0.5) >>> start = np.array([1, 2, 1]) >>> end = np.array([7, 8, 11]) >>> value = np.array([4, 5, 5]) >>> inverse_interpolate(start, end, value) array([0.5, 0.5, 0.4])
- is_closed(points)[source]¶
如果
points给出的样条是闭合的,则返回True,通过检查其第一个和最后一个点是否彼此接近,否则返回False。注意
此函数重新实现了
np.allclose(),因为仅对 2 个点重复调用np.allclose()效率低下。- 参数:
points (Point3D_Array) – 定义样条的点数组。
- 返回:
数组的第一个和最后一个点是否足够接近以被视为相同,从而将定义的样条视为闭合。
- 返回类型:
bool
示例
>>> import numpy as np >>> from manim import is_closed >>> is_closed( ... np.array( ... [ ... [0, 0, 0], ... [1, 2, 3], ... [3, 2, 1], ... [0, 0, 0], ... ] ... ) ... ) True >>> is_closed( ... np.array( ... [ ... [0, 0, 0], ... [1, 2, 3], ... [3, 2, 1], ... [1e-10, 1e-10, 1e-10], ... ] ... ) ... ) True >>> is_closed( ... np.array( ... [ ... [0, 0, 0], ... [1, 2, 3], ... [3, 2, 1], ... [1e-2, 1e-2, 1e-2], ... ] ... ) ... ) False
- match_interpolate(new_start: float, new_end: float, old_start: float, old_end: float, old_value: float) float[source]¶
- match_interpolate(new_start: float, new_end: float, old_start: float, old_end: float, old_value: Point3D) Point3D
将值从旧范围插值到新范围。
- 参数:
new_start – 新范围的起始值。
new_end – 新范围的结束值。
old_start – 旧范围的起始值。
old_end – 旧范围的结束值。
old_value – 旧范围内的值,需要其在新范围中对应的(具有相同 alpha 值的)值。
- 返回类型:
新范围内的插值结果。
示例
>>> match_interpolate(0, 100, 10, 20, 15) np.float64(50.0)
- mid(start: float, end: float) float[source]¶
- mid(start: Point3D, end: Point3D) Point3D
返回两个值之间的中点。
- 参数:
start – 第一个值
end – 第二个值
- 返回类型:
两个值之间的中点
- partial_bezier_points(points, a, b)[source]¶
给定一个定义贝塞尔曲线的点数组,以及两个数 \(a, b\),使得 \(0 \le a < b \le 1\),返回一个相同大小的数组,该数组描述了原始贝塞尔曲线在区间 \([a, b]\) 上的部分。
partial_bezier_points()在概念上等同于调用两次split_bezier()并丢弃未使用的贝塞尔曲线,但这种方法更高效,并且不会浪费计算。另请参阅
有关如何分割贝塞尔曲线的解释,请参见
split_bezier()。注意
要找到贝塞尔曲线在 \(t\) 介于 \(a\) 和 \(b\) 之间的部分
在 \(t = a\) 处分割曲线并提取其第二个子曲线。
我们不能在新子曲线上在 \(t = b\) 处进行评估,因为其 \(t\) 值的范围不同。要找到正确的值,我们需要通过首先减去 \(a\) 将区间 \([a, 1]\) 转换为 \([0, 1-a]\),然后除以 \(1-a\),将其转换为 \([0, 1]\)。因此,我们的新值必须是 \(t = \frac{b - a}{1 - a}\)。定义 \(u = \frac{b - a}{1 - a}\)。
在 \(t = u\) 处分割子曲线并提取其第一个子曲线。
最终部分是点的线性组合,因此该过程可以总结为关于 \(a\) 和 \(b\) 的某个矩阵的线性变换。该矩阵对于在 Manim 中常用的小于等于 3 次的贝塞尔曲线明确给出。对于更高次,使用前面描述的算法。
对于二次贝塞尔曲线的情况
步骤 1
\[\begin{split}H'_1 = \begin{pmatrix} (1-a)^2 & 2(1-a)a & a^2 \\ 0 & (1-a) & a \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} p_0 \\ p_1 \\ p_2 \end{pmatrix}\end{split}\]步骤 2
\[\begin{split}H''_0 &= \begin{pmatrix} 1 & 0 & 0 \\ (1-u) & u & 0\\ (1-u)^2 & 2(1-u)u & u^2 \end{pmatrix} H'_1 \\ & \\ &= \begin{pmatrix} 1 & 0 & 0 \\ (1-u) & u & 0\\ (1-u)^2 & 2(1-u)u & u^2 \end{pmatrix} \begin{pmatrix} (1-a)^2 & 2(1-a)a & a^2 \\ 0 & (1-a) & a \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} p_0 \\ p_1 \\ p_2 \end{pmatrix} \\ & \\ &= \begin{pmatrix} (1-a)^2 & 2(1-a)a & a^2 \\ (1-a)(1-b) & a(1-b) + (1-a)b & ab \\ (1-b)^2 & 2(1-b)b & b^2 \end{pmatrix} \begin{pmatrix} p_0 \\ p_1 \\ p_2 \end{pmatrix}\end{split}\]由此可以定义一个 \((3, 3)\) 矩阵 \(P_2\),当将其应用于点数组时,将返回所需的二次贝塞尔曲线部分
\[\begin{split}P_2 = \begin{pmatrix} (1-a)^2 & 2(1-a)a & a^2 \\ (1-a)(1-b) & a(1-b) + (1-a)b & ab \\ (1-b)^2 & 2(1-b)b & b^2 \end{pmatrix}\end{split}\]类似地,对于三次贝塞尔曲线的情况,可以定义以下 \((4, 4)\) 矩阵 \(P_3\)
\[\begin{split}P_3 = \begin{pmatrix} (1-a)^3 & 3(1-a)^2a & 3(1-a)a^2 & a^3 \\ (1-a)^2(1-b) & 2(1-a)a(1-b) + (1-a)^2b & a^2(1-b) + 2(1-a)ab & a^2b \\ (1-a)(1-b)^2 & a(1-b)^2 + 2(1-a)(1-b)b & 2a(1-b)b + (1-a)b^2 & ab^2 \\ (1-b)^3 & 3(1-b)^2b & 3(1-b)b^2 & b^3 \end{pmatrix}\end{split}\]- 参数:
points (BezierPointsLike) – 定义贝塞尔曲线的点集。
a (float) – 所需部分贝塞尔曲线的下限。
b (float) – 所需部分贝塞尔曲线的上限。
- 返回:
包含定义部分贝塞尔曲线的控制点的数组。
- 返回类型:
- point_lies_on_bezier(point, control_points, round_to=1e-06)[source]¶
检查给定点是否位于给定控制点的贝塞尔曲线上。
这是通过将该点作为常数项求解贝塞尔多项式来完成的;如果存在任何实根,则该点位于贝塞尔曲线上。
- 参数:
point (Point3DLike) – 要检查点的笛卡尔坐标。
control_points (BezierPointsLike) – 贝塞尔曲线的有序控制点的笛卡尔坐标,该点可能位于或不位于该曲线上。
round_to (float) – 一个浮点数,所有值(例如点坐标)的小数位数将四舍五入到该浮点数指定的小数位数。
- 返回:
点是否位于曲线上。
- 返回类型:
bool
- proportions_along_bezier_curve_for_point(point, control_points, round_to=1e-06)[source]¶
根据给定点的贝塞尔曲线控制点,获取该点沿贝塞尔曲线的比例。
贝塞尔多项式是使用给定点的坐标以及贝塞尔曲线的控制点构建的。在求解每个维度的多项式时,如果每个维度都有共同的根,则这些根给出该点沿曲线的比例。如果没有实根,则该点不在曲线上。
- 参数:
point (Point3DLike) – 应获取其参数的点的笛卡尔坐标。
control_points (BezierPointsLike) – 贝塞尔曲线的有序控制点的笛卡尔坐标,该点可能位于或不位于该曲线上。
round_to (float) – 一个浮点数,所有值(例如点坐标)的小数位数将四舍五入到该浮点数指定的小数位数。
- 返回:
包含贝塞尔曲线上给定点的可能参数(沿贝塞尔曲线的比例)的列表。这通常只包含一个或零个元素,但如果该点位于(例如)闭合循环的起点/终点,则可能返回一个包含多个值的列表,对应于循环的起点和终点等。
- 返回类型:
np.ndarray[float]
- 抛出:
ValueError – 当
point和控制点具有不同形状时。
- split_bezier(points, t)[源代码]¶
将贝塞尔曲线在参数
t处分割成两条曲线。注意
以三次贝塞尔曲线为例,令 \(p_0, p_1, p_2, p_3\) 为曲线 \(C_0 = [p_0, \ p_1, \ p_2, \ p_3]\) 所需的点。
定义 3 条线性贝塞尔曲线 \(L_0, L_1, L_2\),作为 \(p_0, p_1, p_2, p_3\) 的插值
\[\begin{split}L_0(t) &= p_0 + t(p_1 - p_0) \\ L_1(t) &= p_1 + t(p_2 - p_1) \\ L_2(t) &= p_2 + t(p_3 - p_2)\end{split}\]定义 2 条二次贝塞尔曲线 \(Q_0, Q_1\),作为 \(L_0, L_1, L_2\) 的插值
\[\begin{split}Q_0(t) &= L_0(t) + t(L_1(t) - L_0(t)) \\ Q_1(t) &= L_1(t) + t(L_2(t) - L_1(t))\end{split}\]那么 \(C_0\) 是 \(Q_0\) 和 \(Q_1\) 的以下插值
\[C_0(t) = Q_0(t) + t(Q_1(t) - Q_0(t))\]在值 \(t=t'\) 处计算 \(C_0\) 会将 \(C_0\) 分割成两条三次贝塞尔曲线 \(H_0\) 和 \(H_1\),由我们之前计算的某些点定义
\[\begin{split}H_0 &= [p_0, &\ L_0(t'), &\ Q_0(t'), &\ C_0(t') &] \\ H_1 &= [p_0(t'), &\ Q_1(t'), &\ L_2(t'), &\ p_3 &]\end{split}\]由于所得曲线是通过
points的线性组合获得的,因此一切都可以编码成矩阵以提高效率,这适用于三次及以下的贝塞尔曲线。对于二次贝塞尔曲线的更简单情况
\[\begin{split}H_0 &= \begin{pmatrix} p_0 \\ (1-t) p_0 + t p_1 \\ (1-t)^2 p_0 + 2(1-t)t p_1 + t^2 p_2 \\ \end{pmatrix} &= \begin{pmatrix} 1 & 0 & 0 \\ (1-t) & t & 0\\ (1-t)^2 & 2(1-t)t & t^2 \end{pmatrix} \begin{pmatrix} p_0 \\ p_1 \\ p_2 \end{pmatrix} \\ & \\ H_1 &= \begin{pmatrix} (1-t)^2 p_0 + 2(1-t)t p_1 + t^2 p_2 \\ (1-t) p_1 + t p_2 \\ p_2 \end{pmatrix} &= \begin{pmatrix} (1-t)^2 & 2(1-t)t & t^2 \\ 0 & (1-t) & t \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} p_0 \\ p_1 \\ p_2 \end{pmatrix}\end{split}\]从中可以定义一个 \((6, 3)\) 分割矩阵 \(S_2\),它可以乘以
points数组以计算返回值\[\begin{split}S_2 &= \begin{pmatrix} 1 & 0 & 0 \\ (1-t) & t & 0 \\ (1-t)^2 & 2(1-t)t & t^2 \\ (1-t)^2 & 2(1-t)t & t^2 \\ 0 & (1-t) & t \\ 0 & 0 & 1 \end{pmatrix} \\ & \\ S_2 P &= \begin{pmatrix} 1 & 0 & 0 \\ (1-t) & t & 0 \\ (1-t)^2 & 2(1-t)t & t^2 \\ (1-t)^2 & 2(1-t)t & t^2 \\ 0 & (1-t) & t \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} p_0 \\ p_1 \\ p_2 \end{pmatrix} = \begin{pmatrix} \vert \\ H_0 \\ \vert \\ \vert \\ H_1 \\ \vert \end{pmatrix}\end{split}\]对于前面三次贝塞尔曲线的例子
\[\begin{split}H_0 &= \begin{pmatrix} p_0 \\ (1-t) p_0 + t p_1 \\ (1-t)^2 p_0 + 2(1-t)t p_1 + t^2 p_2 \\ (1-t)^3 p_0 + 3(1-t)^2 t p_1 + 3(1-t)t^2 p_2 + t^3 p_3 \end{pmatrix} &= \begin{pmatrix} 1 & 0 & 0 & 0 \\ (1-t) & t & 0 & 0 \\ (1-t)^2 & 2(1-t)t & t^2 & 0 \\ (1-t)^3 & 3(1-t)^2 t & 3(1-t)t^2 & t^3 \end{pmatrix} \begin{pmatrix} p_0 \\ p_1 \\ p_2 \\ p_3 \end{pmatrix} \\ & \\ H_1 &= \begin{pmatrix} (1-t)^3 p_0 + 3(1-t)^2 t p_1 + 3(1-t)t^2 p_2 + t^3 p_3 \\ (1-t)^2 p_1 + 2(1-t)t p_2 + t^2 p_3 \\ (1-t) p_2 + t p_3 \\ p_3 \end{pmatrix} &= \begin{pmatrix} (1-t)^3 & 3(1-t)^2 t & 3(1-t)t^2 & t^3 \\ 0 & (1-t)^2 & 2(1-t)t & t^2 \\ 0 & 0 & (1-t) & t \\ 0 & 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} p_0 \\ p_1 \\ p_2 \\ p_3 \end{pmatrix}\end{split}\]从中可以定义一个 \((8, 4)\) 分割矩阵 \(S_3\),它可以乘以
points数组以计算返回值\[\begin{split}S_3 &= \begin{pmatrix} 1 & 0 & 0 & 0 \\ (1-t) & t & 0 & 0 \\ (1-t)^2 & 2(1-t)t & t^2 & 0 \\ (1-t)^3 & 3(1-t)^2 t & 3(1-t)t^2 & t^3 \\ (1-t)^3 & 3(1-t)^2 t & 3(1-t)t^2 & t^3 \\ 0 & (1-t)^2 & 2(1-t)t & t^2 \\ 0 & 0 & (1-t) & t \\ 0 & 0 & 0 & 1 \end{pmatrix} \\ & \\ S_3 P &= \begin{pmatrix} 1 & 0 & 0 & 0 \\ (1-t) & t & 0 & 0 \\ (1-t)^2 & 2(1-t)t & t^2 & 0 \\ (1-t)^3 & 3(1-t)^2 t & 3(1-t)t^2 & t^3 \\ (1-t)^3 & 3(1-t)^2 t & 3(1-t)t^2 & t^3 \\ 0 & (1-t)^2 & 2(1-t)t & t^2 \\ 0 & 0 & (1-t) & t \\ 0 & 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} p_0 \\ p_1 \\ p_2 \\ p_3 \end{pmatrix} = \begin{pmatrix} \vert \\ H_0 \\ \vert \\ \vert \\ H_1 \\ \vert \end{pmatrix}\end{split}\]- 参数:
points (BezierPointsLike) – 贝塞尔曲线的控制点。
t (float) – 用于分割贝塞尔曲线的
t值。
- 返回:
一个包含定义两条贝塞尔曲线的控制点的数组。
- 返回类型:
- subdivide_bezier(points, n_divisions)[源代码]¶
将贝塞尔曲线细分为 \(n\) 条形状相同的子曲线。
曲线被分割的点位于参数 \(t = \frac{i}{n}\) 处,其中 \(i \in \{1, ..., n-1\}\)。
另请参阅
有关如何分割贝塞尔曲线的解释,请参见
split_bezier()。有关此函数的更多理解,请参见
partial_bezier_points()。
注意
所得子曲线可以表示为
points的线性组合,这些组合可以编码在一个矩阵中,该矩阵已为二次和三次贝塞尔曲线预先计算。以二次贝塞尔曲线为例:借鉴
partial_bezier_points()中的解释,其中定义了以下矩阵 \(P_2\) 以提取二次贝塞尔曲线在 \(t \in [a, b]\) 范围内的部分\[\begin{split}P_2 = \begin{pmatrix} (1-a)^2 & 2(1-a)a & a^2 \\ (1-a)(1-b) & a(1-b) + (1-a)b & ab \\ (1-b)^2 & 2(1-b)b & b^2 \end{pmatrix}\end{split}\]计划是将 \([a, b]\) 替换为 \(\left[ \frac{i-1}{n}, \frac{i}{n} \right], \ \forall i \in \{1, ..., n\}\)。
以 \(n = 2\) 细分为例,构造区间 \(\left[ 0, \frac{1}{2} \right]\) 的 \(P_1\),以及区间 \(\left[ \frac{1}{2}, 1 \right]\) 的 \(P_2\)
\[\begin{split}P_1 = \begin{pmatrix} 1 & 0 & 0 \\ 0.5 & 0.5 & 0 \\ 0.25 & 0.5 & 0.25 \end{pmatrix} , \quad P_2 = \begin{pmatrix} 0.25 & 0.5 & 0.25 \\ 0 & 0.5 & 0.5 \\ 0 & 0 & 1 \end{pmatrix}\end{split}\]因此,可以构造以下 \((6, 3)\) 细分矩阵 \(D_2\),它将把
points数组细分为 2 部分\[\begin{split}D_2 = \begin{pmatrix} M_1 \\ M_2 \end{pmatrix} = \begin{pmatrix} 1 & 0 & 0 \\ 0.5 & 0.5 & 0 \\ 0.25 & 0.5 & 0.25 \\ 0.25 & 0.5 & 0.25 \\ 0 & 0.5 & 0.5 \\ 0 & 0 & 1 \end{pmatrix}\end{split}\]对于二次和三次贝塞尔曲线,细分矩阵会进行记忆化以提高效率。对于更高次的曲线,则改用受
split_bezier()启发而来的迭代算法。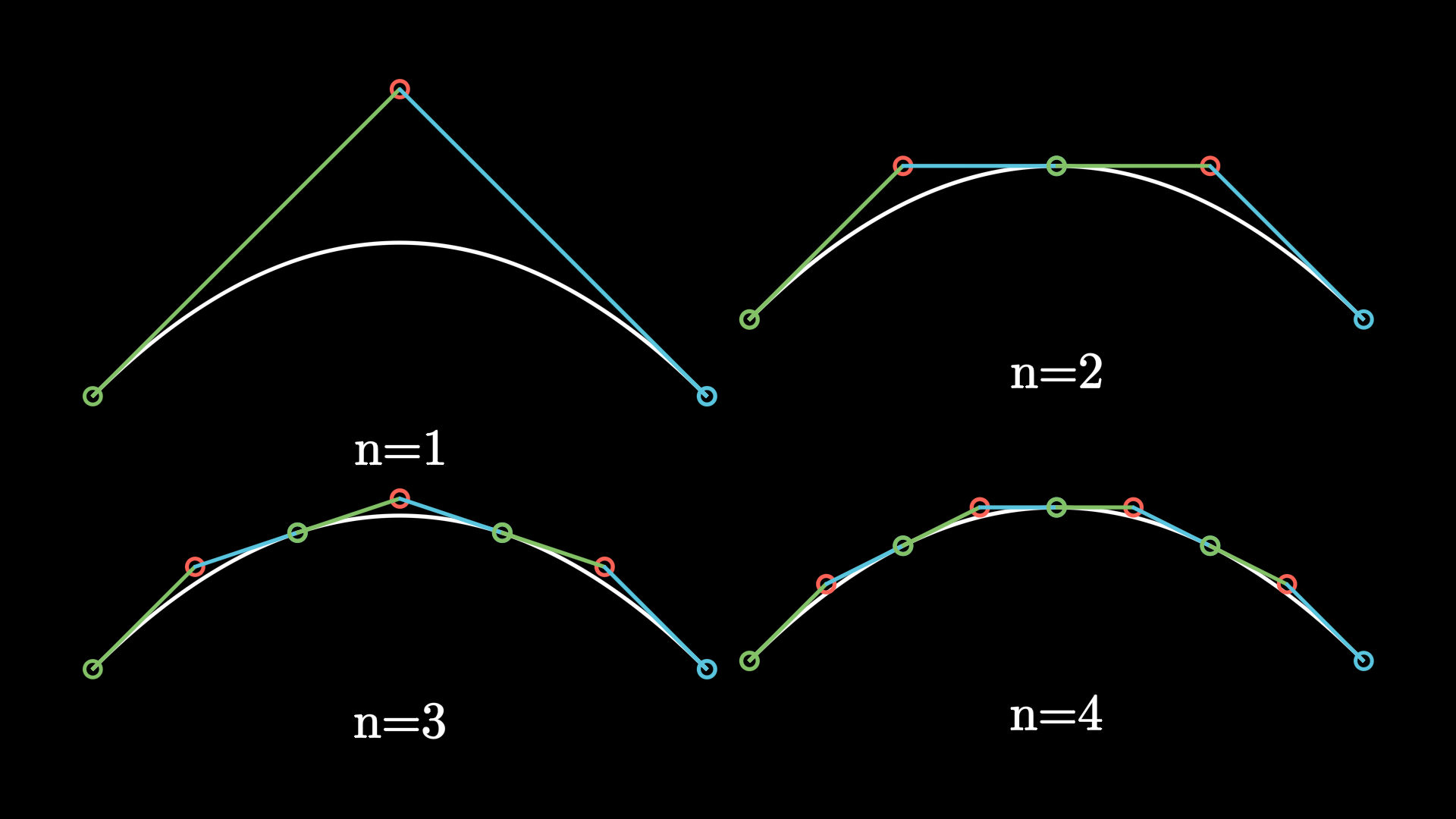
- 参数:
points (BezierPointsLike) – 贝塞尔曲线的控制点。
n_divisions (int) – 将贝塞尔曲线细分为的曲线数量
- 返回:
一个包含定义新 \(n\) 条子曲线的点的数组。
- 返回类型: